





















Todos los productos
-
Visión nocturna de infrarrojos multifuncional de mano
-
Robot para la eliminación de explosivos
-
Robot de reconocimiento en miniatura
-
Visión nocturna digital monocular
-
Dispositivo digital de visión nocturna
-
Anti francotirador
-
Radar portátil
-
Lámpara de registro de patrulla
-
Equipo de operaciones especiales tácticas
-
Alcance del rifle
-
Telémetro del laser
-
Modelo militar
-
equipo táctico
-
Señuelos inflables
Robot de destrucción de bombas ligero







| Lugar de origen | China. |
|---|---|
| Nombre de la marca | Particle |
| Cantidad de orden mínima | 1 pieza |
| Precio | $17,000 |
| Condiciones de pago | T/T |

Éntreme en contacto con gratis las muestras y los vales.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
skype: sales10@aixton.com
Si usted tiene alguna preocupación, proporcionamos ayuda en línea de 24 horas.
xDatos del producto
| Nombre | Robot de EOD | Aplicación | Eliminación de artefactos explosivos (EOD) en entornos de alto riesgo. |
|---|---|---|---|
| Soporte personalizado | OED,ODM,OBM | Garantía | 1 año |
| Color | Negro | Horario de trabajo (temperatura ambiente) | ≥2H |
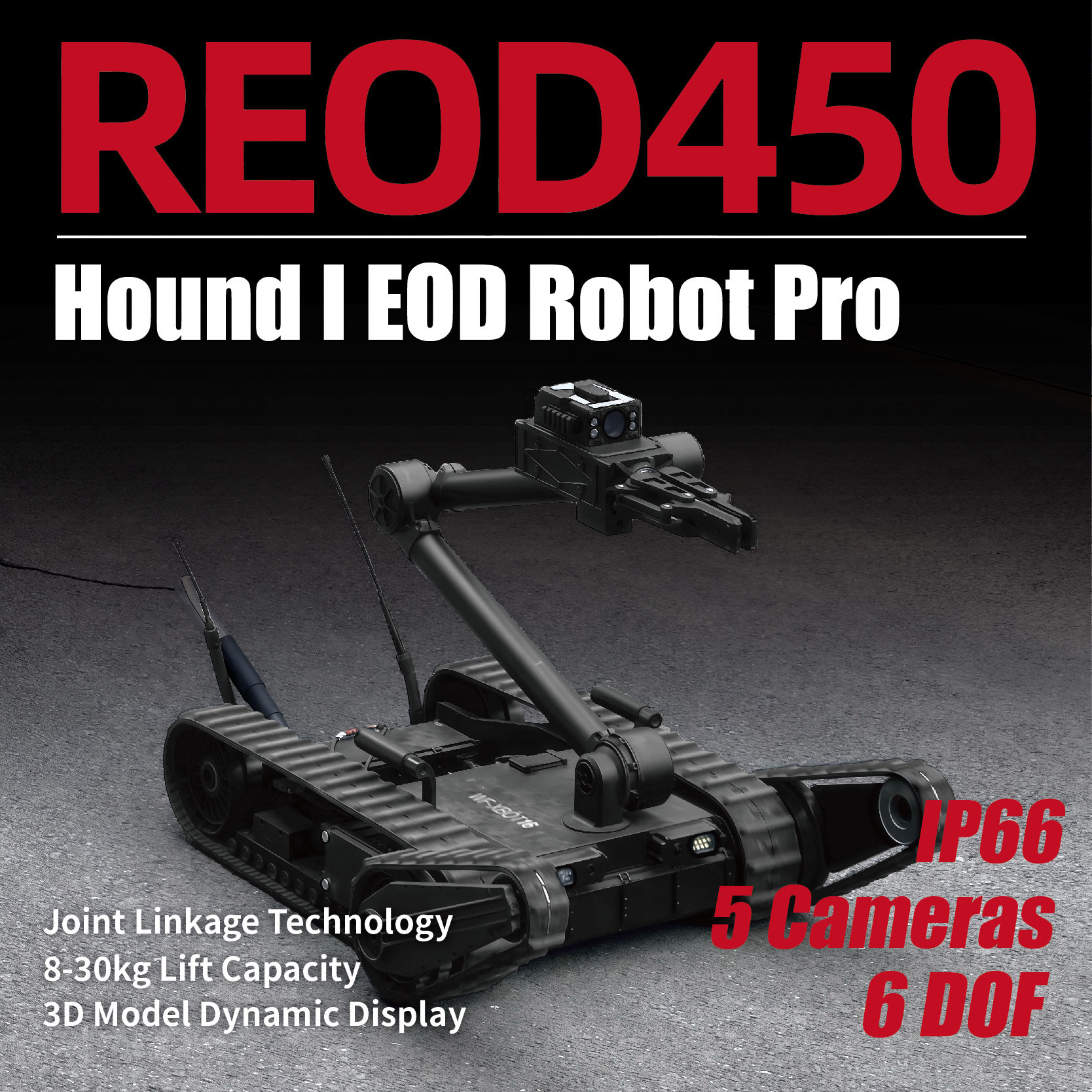
| Temperatura de funcionamiento | -40℃~+50℃ | Grado IP | IP66 |
| Tamaño | ≤850×600×660 mm (completamente guardado) | Peso | ≤50kg (Contiene dos juegos de baterías) |
| Velocidad máxima | ≥ 1,8 m/s (5 marchas, continuamente variable) | Sobre la capacidad de obstáculo | ≥ 300 mm |
| Ancho de la ranura | ≥ 400 mm | Graduabilidad | ≥45° |
| Subir escaleras | ≥45° | Ancho máximo de apertura de la pinza | ≥160mm |
| Capacidad de elevación | 8-30kg | Método de operación | Operación de modo dual del botón basculante y la pantalla táctil |
| Método de control | Control por cable ≥ 100 m ((cable estándar), control inalámbrico ≥ 1000 m ((exterior) | ||
| Resaltar | Aparatos para el control de la velocidad,Binoculares nocturnos de luz láser,binoculares de visión nocturna de 6000 m |
||
Descripción de producto
Robot de destrucción de bombas ligero
Descripción y características
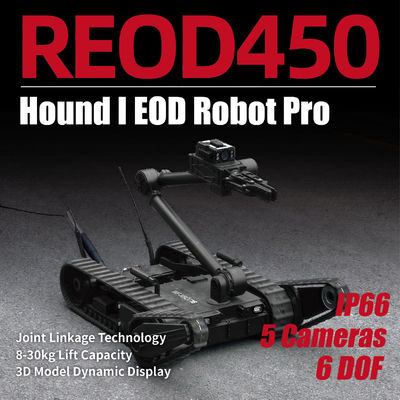
El robot REOD450 EOD es una solución avanzada para la eliminación de municiones explosivas (EOD) en entornos de alto riesgo.lo que lo hace altamente eficiente para operaciones como el antiterrorismo urbanoEl robot es compacto y ligero, con dimensiones de ≤850 mm × 600 mm × 400 mm (completamente empotrado) y un peso de ≤50 kg.Tiene una velocidad máxima ≥ 1.8 m/s con 5 marchas y un accionamiento variable continuo, una distancia libre de obstáculos de ≥ 300 mm y una capacidad de escalada y escalada de escaleras de hasta 45°,garantizar una maniobrabilidad y adaptabilidad superiores en diversos terrenos.
Equipado con 8 grados de libertadManipulador, el REOD450 ofrece un control preciso con una altura máxima de agarre de ≥ 1700 mm (garra principal) y una distancia de agarre más larga de ≥ 1380 mm (garra principal).permitiendo perspectivas de observación más ricasCon una duración de la batería de ≥ 2 horas a temperatura normal, una clasificación IP66 para resistencia al polvo y al agua,y métodos de control que incluyen el control por cable hasta 100 m y el control inalámbrico hasta 1000 mAdemás, ofrece opciones de personalización OEM y ODM para satisfacer necesidades operativas específicas.
Soporte de control táctil / joystick Interacción más fácil de usar y operación confiable
El diseño gráfico de operación de control táctil / joystick es actualmente una solución líder de control de robots de eliminación de bombas a nivel internacional.Ha sido muy reconocido por los usuarios por su interacción más fácil de usar y funcionamiento confiableSus principales características son las siguientes:
- Diseño gráfico de la operación:Todas las operaciones están diseñadas de manera gráfica, eliminando la necesidad de que los usuarios memoricen funciones complejas de botones y protocolos operativos.Esta interfaz fácil de usar hace que el funcionamiento sea simple e intuitivo, reduciendo significativamente el tiempo de formación.
- Diseño de operación de control táctil / joystick:Tanto los botones del joystick como una pantalla táctil se pueden utilizar para realizar todas las operaciones del robot.La redundancia proporcionada por estos dos métodos de operación no sólo mejora la fiabilidad del sistema sino también mejora la eficiencia operativa mediante la combinación de botones de joystick con controles de pantalla táctil.
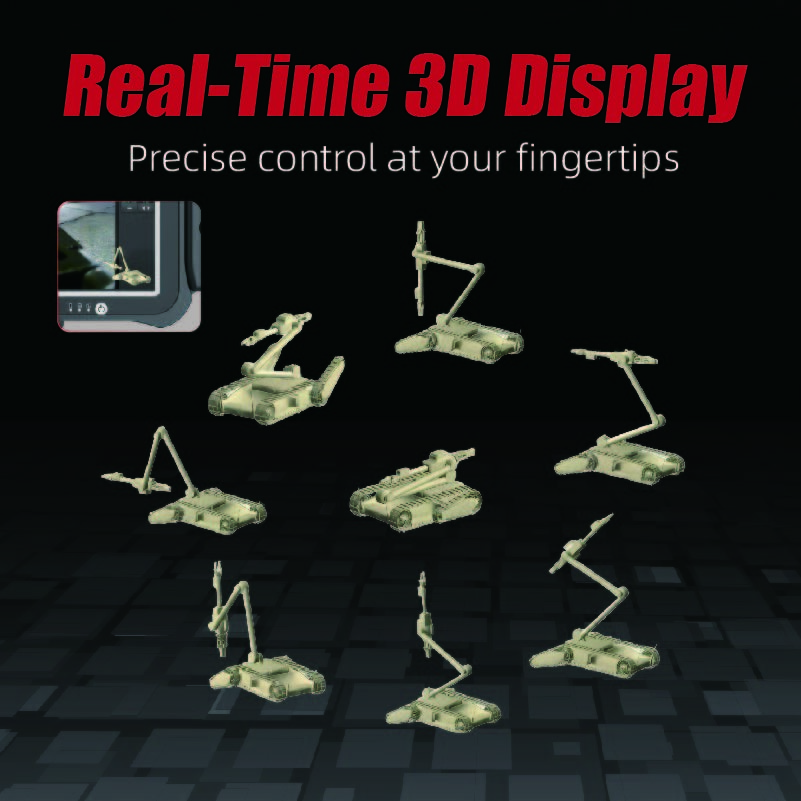
Display 3D remoto en tiempo real
Dado que los robots desactivadores de bombas a menudo operan más allá de la línea de visión durante las misiones, la información en tiempo real sobre los ángulos y las posiciones espaciales de las articulaciones del robot es crucial para los operadores. The REOD450 uses high-speed links and advanced computer technology to not only achieve real-time feedback of the robot's status information but also to employ leading 3D virtual display technology for remote real-time display of the robot's 3D statusEsto hace que el robot se sienta "cerca" incluso cuando está "lejos", lo que permite un funcionamiento más intuitivo.
Las características principales de la pantalla 3D remota en tiempo real son las siguientes:
- Display en tiempo real del estado 3D del robot
- Observación del estado 3D del robot desde varios ángulos
- Acercándose y alejándose del estado 3D del robot
El controlador de mano del robot reproduce el estado 3D remoto del robot, permitiendo que el modelo 3D se acerque, aleje y observe desde cualquier ángulo.
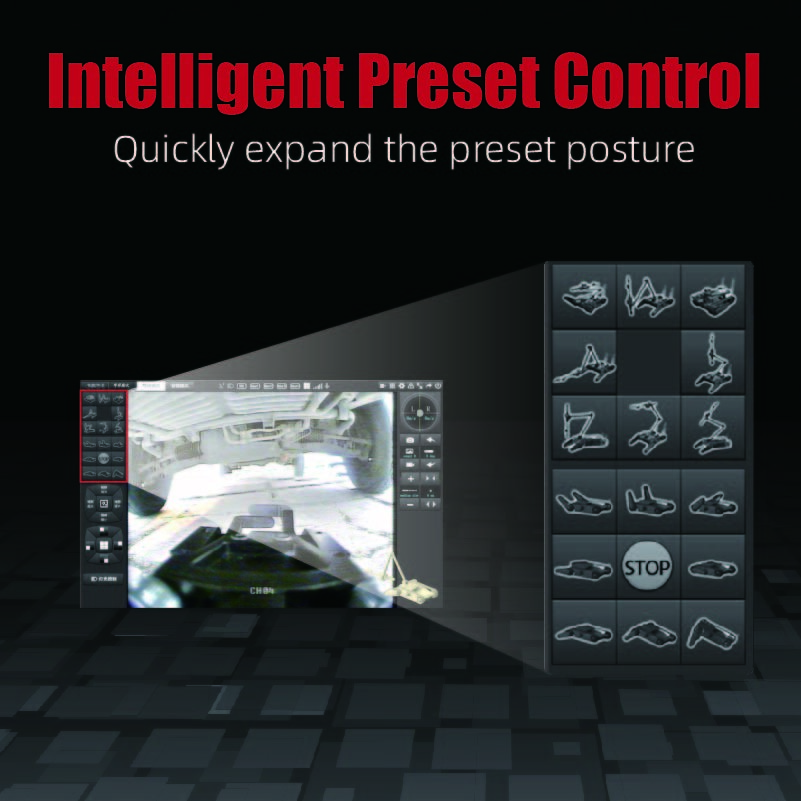
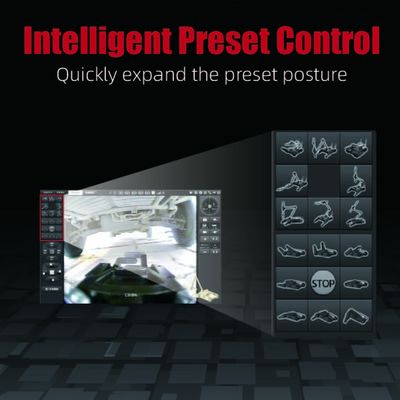
Diseño inteligente de control de postura preseleccionado
Con el "control inteligente de postura preestablecida para tareas comunes", el robot puede "llegar automáticamente a una posición preestablecida con un solo clic" en función de las necesidades del usuario.Esta característica reduce en gran medida la cantidad de operación manual requerida en el sitio, que sirve como un ayudante eficaz para los operadores de primera línea y mejora la fiabilidad y la seguridad de las tareas de eliminación de bombas.
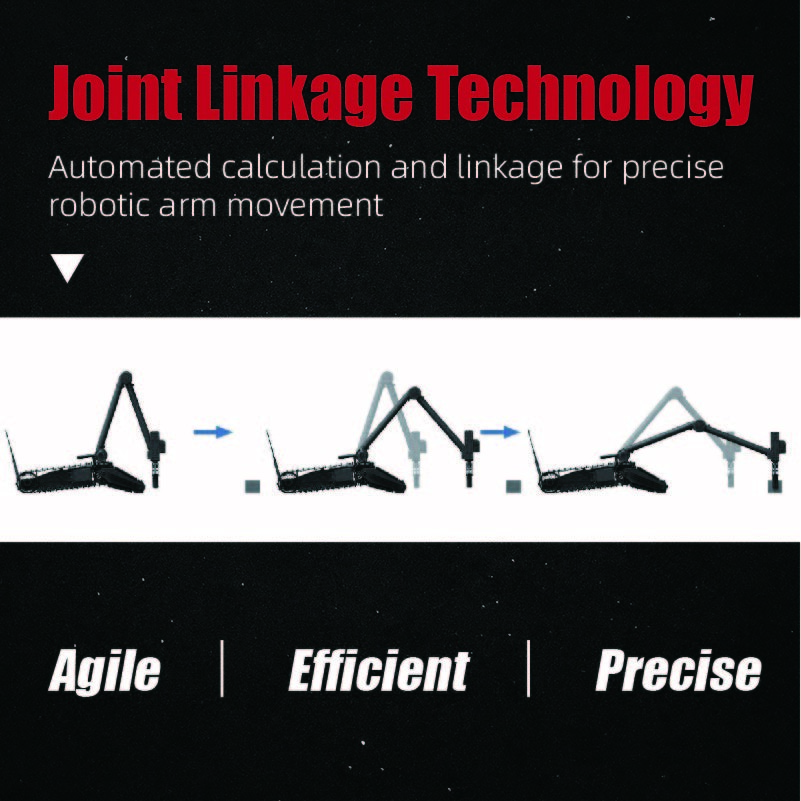
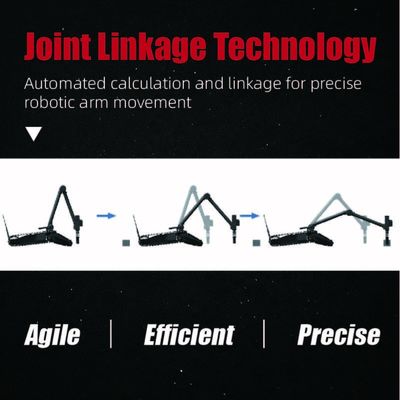
Tecnología de unión conjunta "X-Y-Z" Control más preciso y eficiente
El diseño de operación de la tecnología de enlace de articulaciones X-Y-Z basado en el cálculo automático, también conocido como "diseño de control de traducción de la pinza basado en coordenadas cartesianas,"transforma el control tradicional de "una sola articulación" de los robots de eliminación de bombas en "control coordinado de múltiples articulaciones"Esto mejora significativamente la eficiencia operativa y la precisión de los robots de eliminación de bombas. En comparación con el diseño de control "single-joint", reduce el tiempo de operación promedio en un 80%.
El REOD450 consigue "control de traslación de pinza basado en coordenadas cartesianas" a través del cálculo automático.que controla rápidamente el robot para lograr "movimiento coordinado de múltiples articulaciones" para la traducción unidimensional del agarre espacialEsto reduce en gran medida la dificultad operativa y aumenta la precisión, permitiendo un posicionamiento casi inmediato sin la necesidad de iteraciones repetidas.
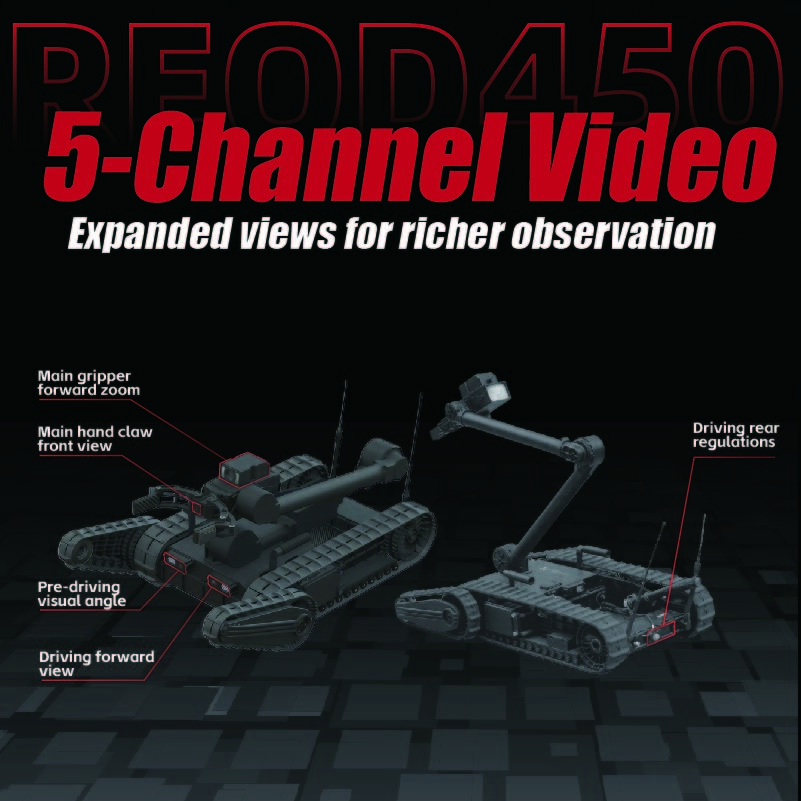
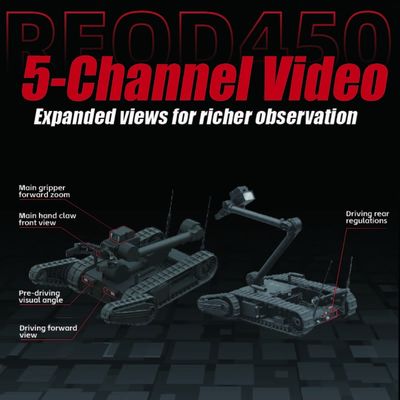
Sistema de imágenes adaptativo al modo
El sistema de imagen del robot actúa como los ojos del operador.mejorar significativamente la capacidad de los operadores de primera línea para percibir entornos remotosEl diseño del sistema de 7 cámaras no es una disposición sencilla, sino una mejora y optimización basada en los problemas que encuentran los usuarios durante el uso real.
El sistema de imágenes se divide generalmente en tres combinaciones de imágenes: modo de conducción, modo de agarre primario y modo de agarre extendido.Se cambia automáticamente entre estos modos basados en tareas típicas como conducir, agarrando y observando, ofreciendo una mayor conciencia ambiental remota y una gama más rica de ángulos de observación.
Diseño de brazo robótico integrado de ocho grados de libertad
El brazo robótico REOD450 cuenta con un diseño integrado de 8 grados de libertad, proporcionando fuertes capacidades de alcance espacial.Este diseño permite que el brazo robótico realice no solo tareas de eliminación de bombas convencionales, sino también operaciones que los robots de eliminación de bombas convencionales con 5 o 6 grados de libertad no pueden manejar, como agarrar objetos en ambientes altos, bajos y profundos, o en la mesa, así como realizar reconocimiento multiángulo en ambientes altos, bajos y profundos.
Sistema de herramientas de cambio rápido versátil
El robot REOD450 está equipado con 18 tipos de "herramientas de cambio rápido", incluyendo 6 juegos de herramientas de agarre, 6 juegos de herramientas básicas y 6 juegos de herramientas extendidas,que permite el reemplazo rápido de los "conjuntos de herramientas de agarre" en función de las diferentes tareas operativas y de los tipos y formas de los distintos objetos peligrosos, satisfaciendo así las diversas necesidades operativas de los usuarios.
Aplicaciones
Galería de imágenes
Parámetros técnicos
| Plataforma de robots | |
| Tamaño | ≤ 850 × 600 × 660 mm ((Todo el material almacenado) |
| Peso | ≤ 50 kg (Contiene dos conjuntos de baterías) |
| Velocidad máxima | Se aplicará el método de comprobación de la velocidad de rodaje. |
| Sobre la capacidad de obstáculo | ≥300 mm |
| Ancho de la ranura | ≥ Cuatrocientos milímetros |
| Gradabilidad | ≥ 45° |
| Subir escaleras | ≥ 45° |
| Duración de la batería (temperatura normal) | ≥ 2 horas |
| Grado IP | Protección IP66 |
| Desempeño de agarre del brazo robótico | |
| Estado ampliado | ≥ 8 kg |
| Estado retirado | ≥ 30 kg |
| Las garras | 1 |
| Artigos móviles | 8 |
| Altura máxima de observación | ≥Cubierta |
| Altura máxima de agarre | ≥En el caso de los vehículos de la categoría M1(Las garras principales),≥Con una anchura igual o superior a 2000 mm(- ¿ Qué es eso?) |
| Distancia de agarre más lejana | ≥de una longitud igual o superior a 10 mm(Las garras principales),≥ 1650 mm(- ¿ Qué es eso?) |
| Ancho máximo de apertura de la pinza | ≥de una longitud igual o superior a 160 mm |
| Controlador portátil | |
| Tamaño | No más360 × 210 × 70 mm |
| Peso | ≤ 2 kg ((sin mochila) |
| Pantalla de visualización | 10.1' LCD |
| Display de vídeo | 7 canales |
| Método de funcionamiento | Funcionamiento en doble modo del botón de balanceo y de la pantalla táctil |
| Método de control |
Control por cable ≥ 100 m ((cable estándar), control inalámbrico ≥ 1000 m ((exterior) |
Productos recomendados