





















Todos los productos
-
Visión nocturna de infrarrojos multifuncional de mano
-
Robot para la eliminación de explosivos
-
Robot de reconocimiento en miniatura
-
Visión nocturna digital monocular
-
Dispositivo digital de visión nocturna
-
Anti francotirador
-
Radar portátil
-
Lámpara de registro de patrulla
-
Equipo de operaciones especiales tácticas
-
Alcance del rifle
-
Telémetro del laser
-
Modelo militar
-
equipo táctico
-
Señuelos inflables
X-Y-Z Coordinado del brazo robótico Robot EOD de tamaño mediano







| Lugar de origen | China. |
|---|---|
| Nombre de la marca | Particle |
| Número de modelo | Se trata de un sistema de control de la calidad. |
| Cantidad de orden mínima | 1 |
| Precio | $205,761 |
| Condiciones de pago | T/T |

Éntreme en contacto con gratis las muestras y los vales.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
skype: sales10@aixton.com
Si usted tiene alguna preocupación, proporcionamos ayuda en línea de 24 horas.
xDatos del producto
| Velocidad máxima | Se aplicarán las siguientes medidas: | Características especiales | A prueba de explosión, a prueba de agua, capacidad de desarme remoto |
|---|---|---|---|
| Nombre del producto | Objetivos de la misión Robot de EOD Hound-III para medidas de eliminación y transferencia de riesgos | Características | 1- Diseño de brazo mecánico de alta resistencia, que confiere un potente rendimiento de arranque; - |
| Peso de la plataforma del robot | ≤ 350 kg ((Contiene baterías); | Profundidad de la plataforma del robot | ≥ 500 mm; |
| Aplicaciones | Respuesta a los artefactos explosivos improvisados | Tamaño de la plataforma del robot | Las medidas de seguridad se aplicarán a los vehículos de las categorías M1 y M2 incluidos en el pres |
| Tamaño del robot | ≤ 950×650×650 mm ((Todo lleno) | Peso del robot | ≤ 50 kg ((Contiene dos conjuntos de baterías) |
| Sobre la capacidad de obstáculo | ≥400MM | Ancho de la ranura | ≥400MM |
| Gradabilidad | ≥45° | Subir escaleras | ≥45° |
| Profundidad de vadeo | ≥200mm | Duración de la batería (temperatura normal) | ≥3h |
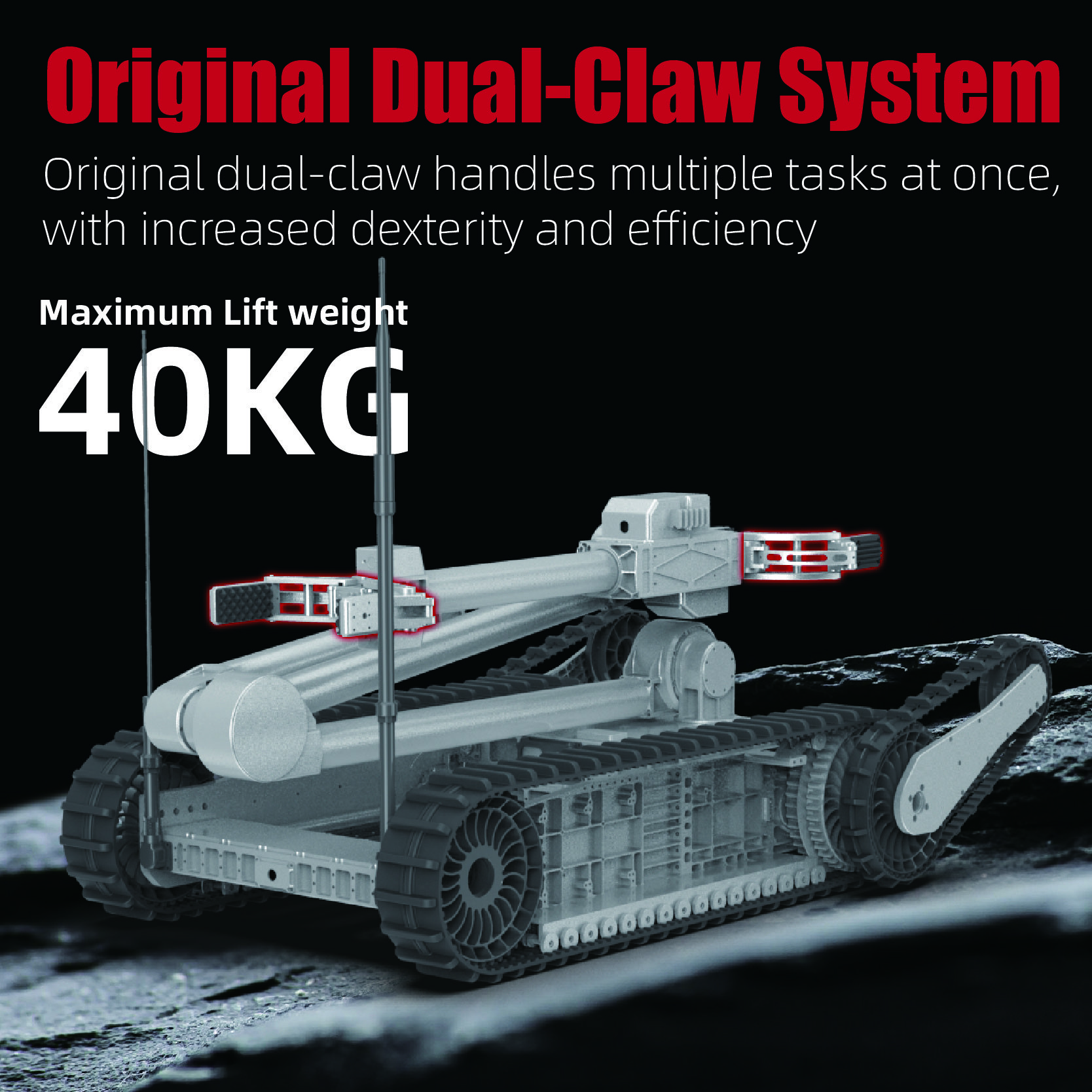
| Duración del brazo | Con una anchura igual o superior a 2000 mm | Peso máximo del botín | ≥ 40 kg |
| Garras | 2 | Artigos móviles | 8 |
| Tamaño del regulador | ≤ 270 mm × 170 mm × 100 mm | Peso del regulador | ≤ 1,2 kg ((sin mochila) |
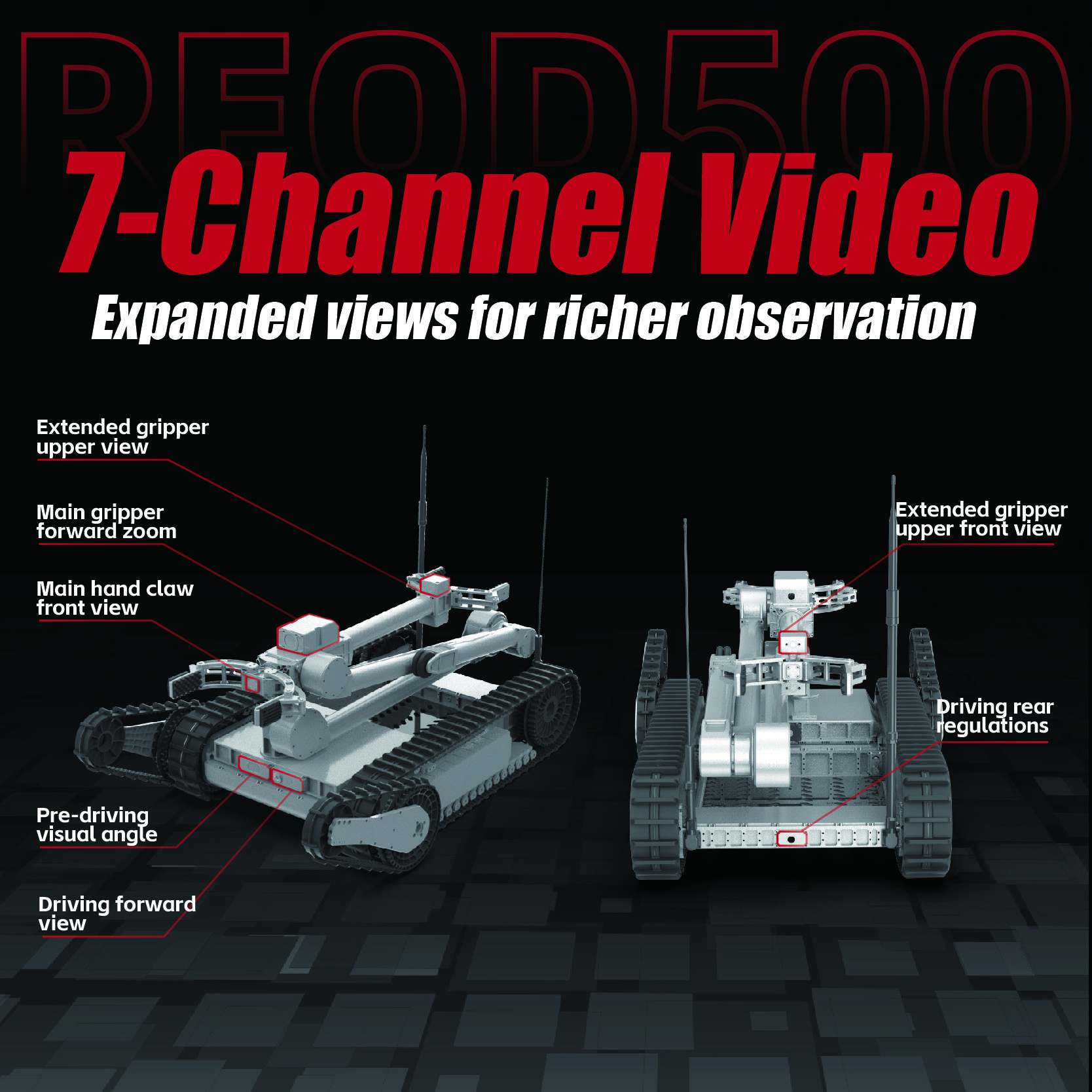
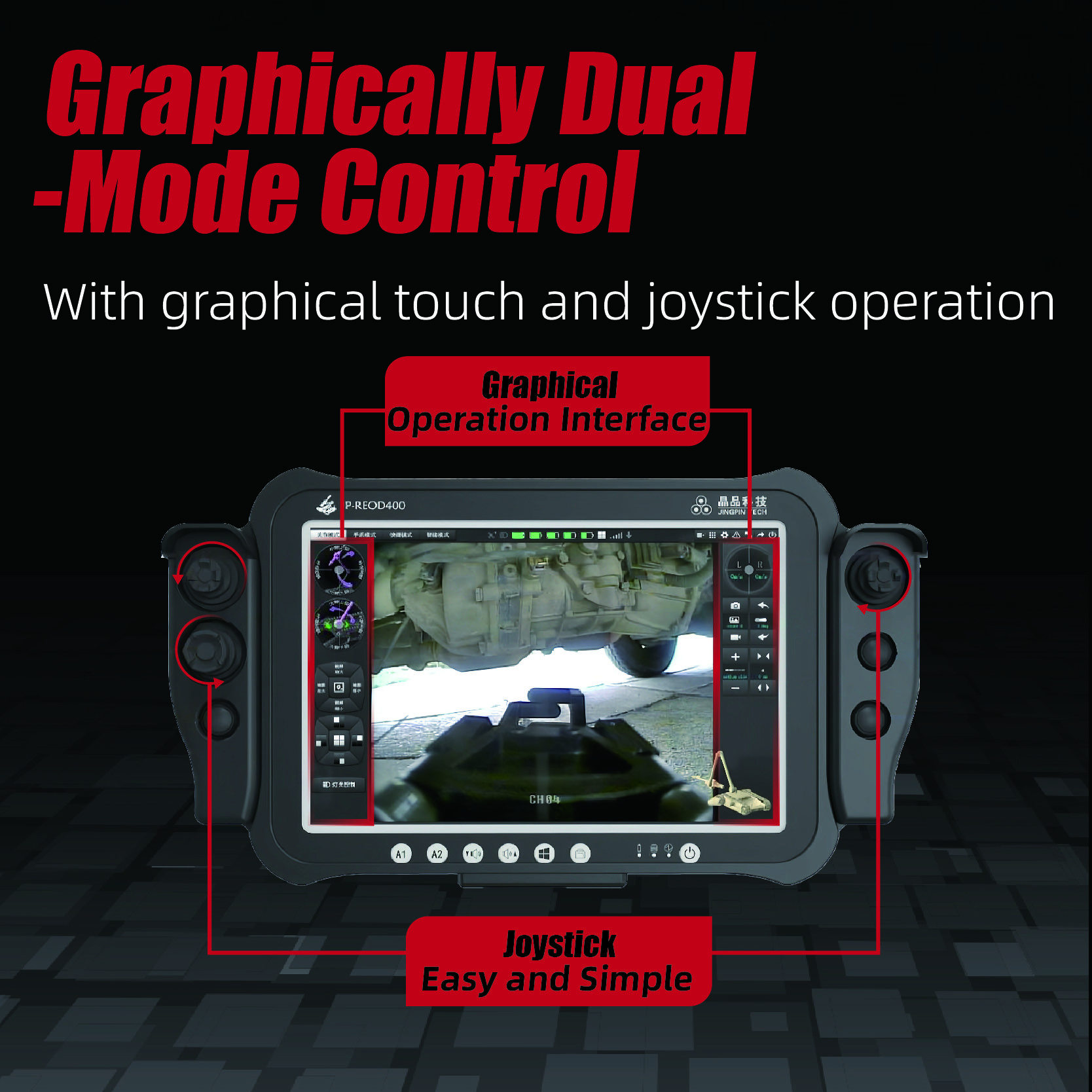
| Pantalla de visualización del controlador | Display de pantalla de 7 pulgadas | Display de vídeo | 7 canales, uno de los cuales tiene función de zoom de enfoque automático |
| Método de funcionamiento | Operación en doble modo de botón y pantalla táctil | Método de control | Control por cable ≥ 100 m ((cable estándar), control inalámbrico ≥ 1000 m ((exterior) |
| Grado IP de la plataforma del robot | Protección IP66 | Grado IP del brazo | Protección IP66 |
| Temperatura de funcionamiento | -40°C ∼ +50°C | Temperatura de almacenamiento | -45°C+60°C |
| Resaltar | Robótico de eliminación de municiones explosivas con brazo robótico coordinado,Robot de eliminación de municiones explosivas medianas,Protección IP66 de los robots |
||
Descripción de producto
Productores de robots de EOD de tamaño mediano con brazo robótico de coordinación XYZ avanzado
Descripción y características
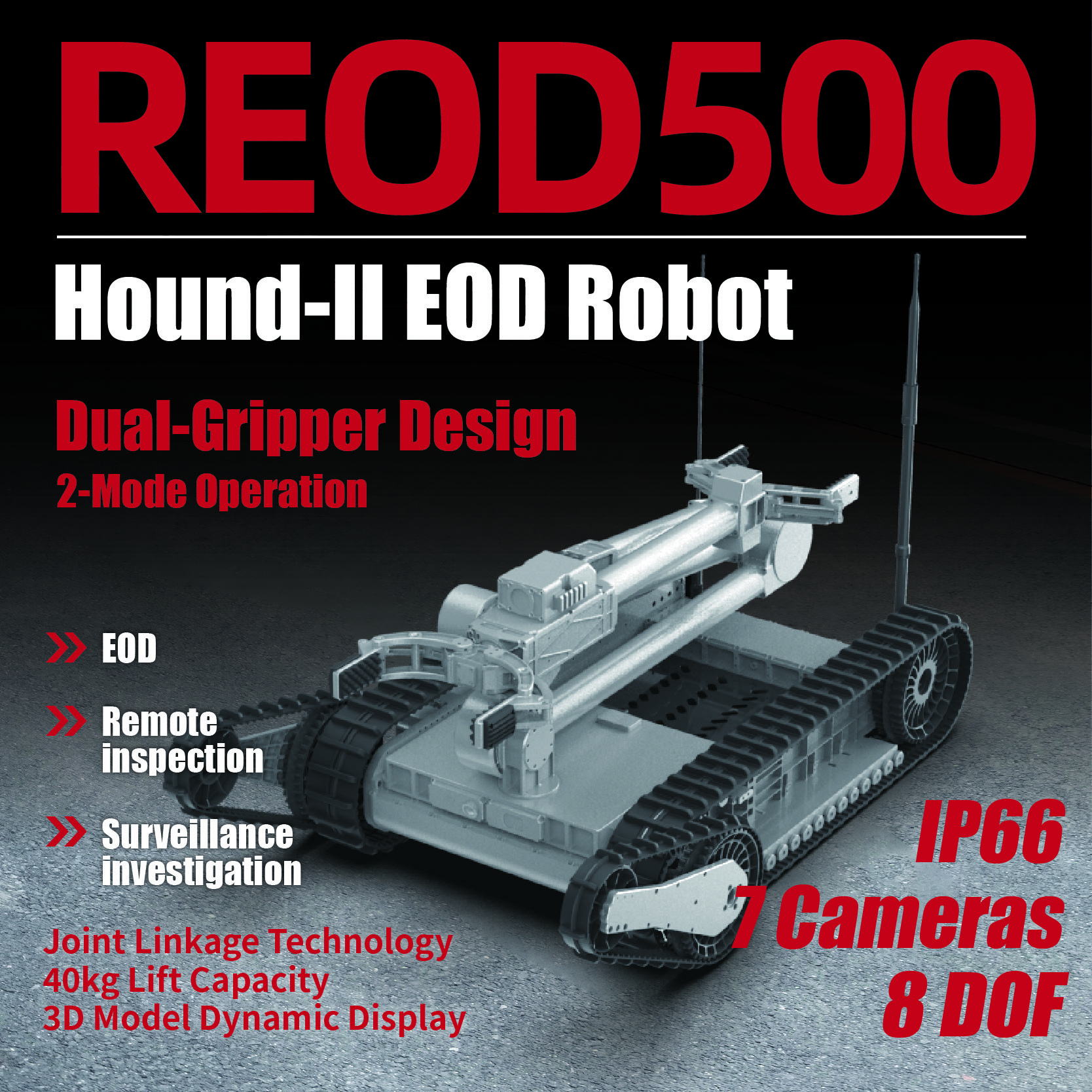
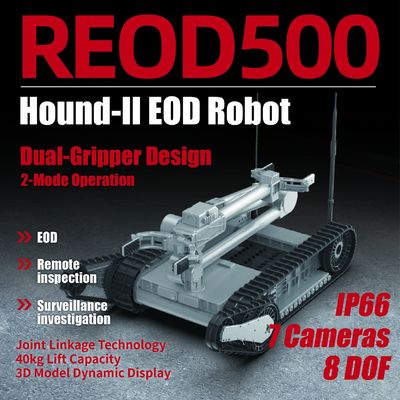
El robot EOD JP REOD500 es una solución avanzada para la eliminación de municiones explosivas (EOD) en entornos de alto riesgo.Con un sistema de desplazamiento con brazo giratorio que combina el desplazamiento principal con un mecanismo de obstáculo con brazo giratorio, este diseño mejora significativamente las capacidades de navegación por obstáculos del robot, garantizando un rendimiento robusto y confiable en las operaciones de EOD.El robot está equipado con un brazo robótico de varios grados de libertad que proporciona poderosas capacidades de agarre y manejo. El JP REOD500 tiene dimensiones de ≤ 900 mm × 650 mm × 500 mm (completamente empotrado) y un peso de ≤ 42 kg. Tiene una velocidad máxima de ≥ 2,0 m/s, una distancia libre de obstáculos de ≥ 320 mm,y una capacidad de subida de escaleras de hasta 45°, garantizando una maniobrabilidad superior en diversos terrenos.
Equipado con un manipulador de 8 grados de libertad, el JP REOD500 ofrece un control preciso con una altura máxima de agarre de ≥ 1800 mm (garra principal) y una distancia de agarre más larga de ≥ 1400 mm (garra principal).El robot admite una pantalla de vídeo de 7 canales, que permite perspectivas de observación más ricas, y cuenta con capacidades de visualización remota de postura 3D en tiempo real.una clasificación IP67 para resistencia al polvo y al agua, y métodos de control que incluyen control de cable hasta 120 m y control inalámbrico hasta 1200 m, el JP REOD500 está construido para la fiabilidad y versatilidad en condiciones difíciles.ofrece opciones de personalización OEM y ODM para satisfacer necesidades operativas específicas.
Diseño mejorado del brazo mecánico ️ Gran mejora en el rendimiento de agarre
El JP REOD500 cuenta con un diseño mejorado del brazo mecánico que mejora significativamente sus capacidades de agarre.Este diseño avanzado permite al robot manejar una variedad de objetos peligrosos con mayor precisión y resistencia, mejorando la eficiencia general de las operaciones de EOD.
Diseño innovador de patentes de "dos garras" Capacidades de multitarea
El diseño patentado de "dos garras" permite que el JP REOD500 resuelva múltiples tareas simultáneamente.como agarrar objetos al abrir puertas o realizar otras tareas auxiliares, por lo que es muy eficaz para misiones de EOD.
Operación gráficamente en doble modo Experiencia de operación conveniente y fiable
La operación gráfica de doble modo proporciona a los usuarios una interfaz intuitiva para controlar el robot.garantizar la facilidad de uso y la fiabilidad en entornos de alto estrésEste diseño elimina la necesidad de que los usuarios memoricen funciones complejas de botones, reduciendo el tiempo de formación y mejorando la eficiencia operativa.
Display 3D remoto en tiempo real ️ Funcionamiento perfecto delante de sus ojos
El JP REOD500 utiliza tecnología avanzada de visualización virtual 3D para retroalimentación en tiempo real del estado del robot.proporcionando una comprensión intuitiva y detallada del posicionamiento y el entorno del robot, incluso cuando opera más allá de la línea de visión.
Diseño de control preestablecido inteligente
El diseño inteligente de control "preset" permite que el JP REOD500 alcance automáticamente las posiciones preestablecidas con un solo clic, según las necesidades del usuario.reducir la cantidad de intervención manual requerida y garantizar una ejecución rápida y fiable de las tareas.
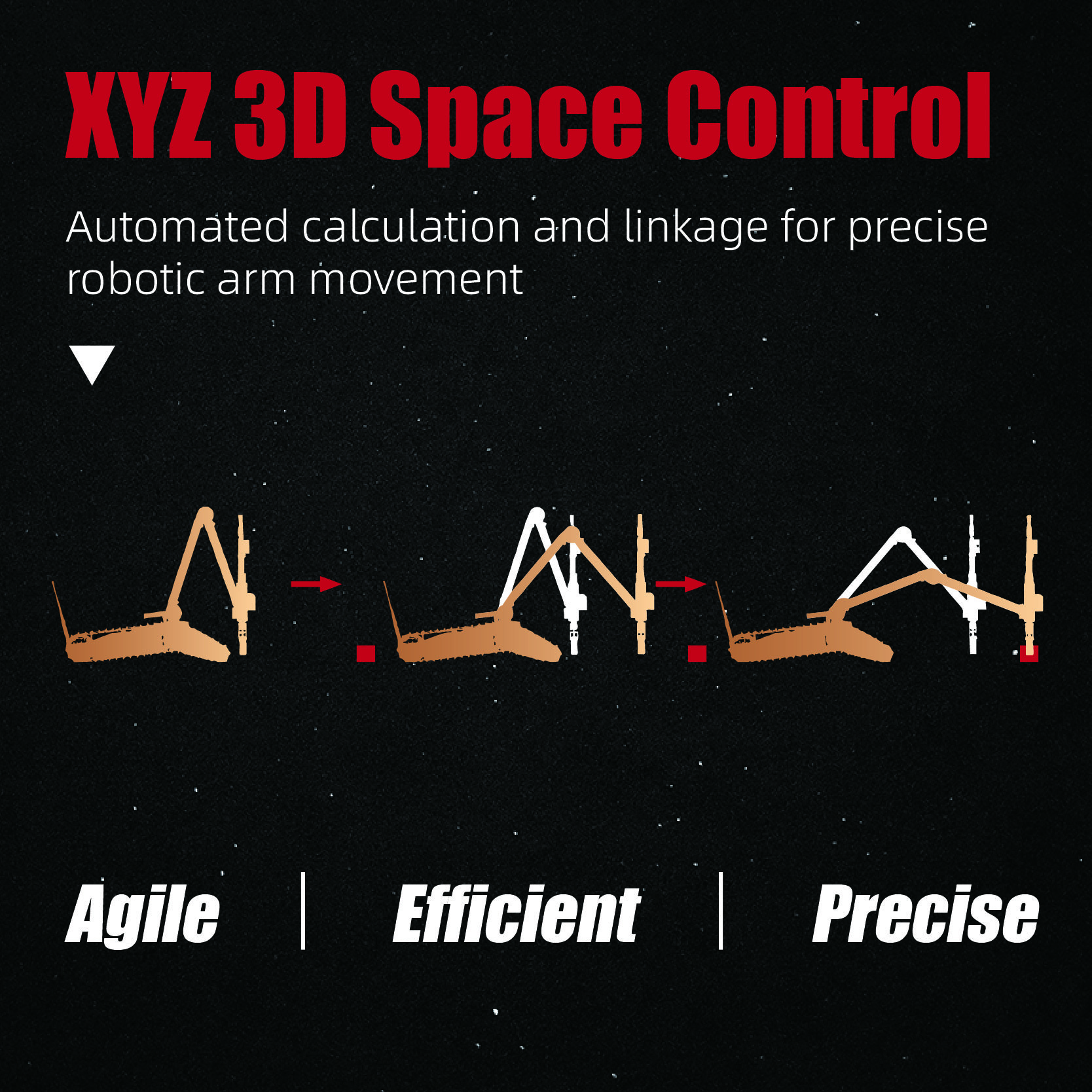
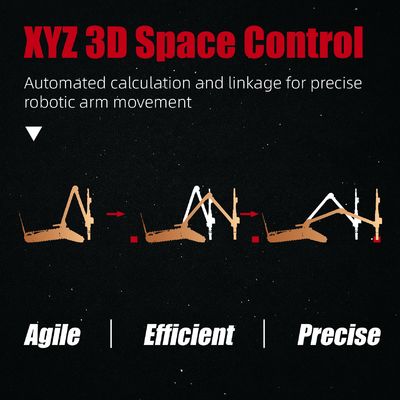
Diseño de enlace de brazo robótico en el espacio tridimensional "X-Y-Z" Control preciso
El JP REOD500 emplea un diseño tridimensional de enlace de brazo robótico "X-Y-Z" basado en el cálculo automático, proporcionando un control preciso sobre los movimientos del robot.Este diseño mejora la eficiencia y precisión de las tareas de eliminación de bombas, reduciendo el tiempo medio de funcionamiento hasta en un 80% en comparación con el control tradicional de una sola articulación.
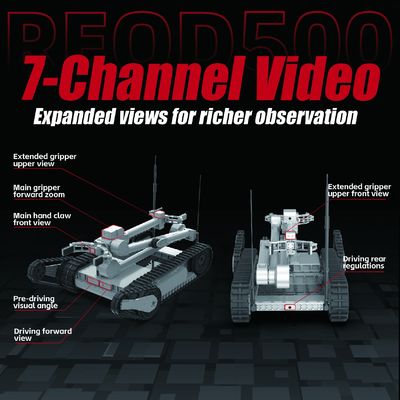
Sistema de vídeo de 7 canales Perspectivas de observación más ricas
Equipado con un sistema de vídeo de 7 canales, el JP REOD500 proporciona múltiples ángulos de observación para mejorar la conciencia situacional.modo de agarre primario, y modo de agarre auxiliar, adaptándose al contexto operativo para una visualización óptima.
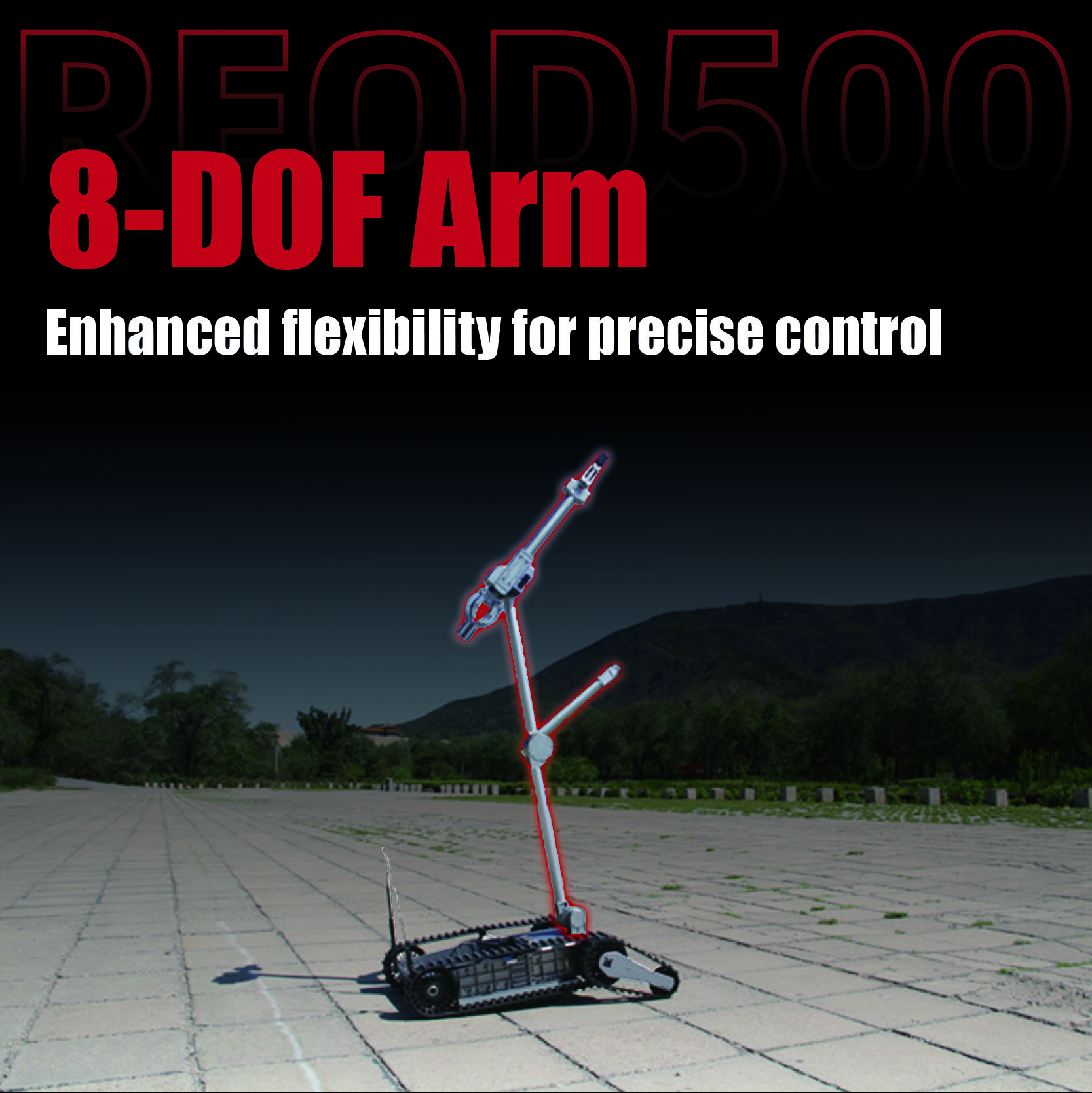
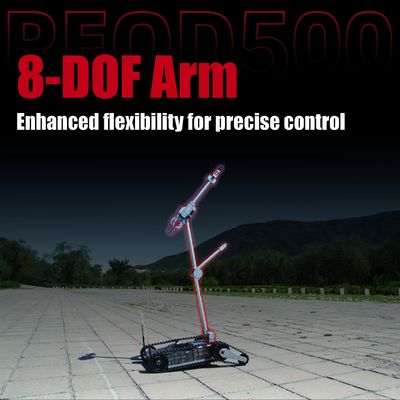
Diseño del brazo robótico con 8 grados de libertad
El diseño del brazo robótico de 8 grados de libertad da al JP REOD500 fuertes capacidades de alcance espacial, lo que le permite realizar tareas en ambientes altos, bajos, profundos o de mesa.Esta flexibilidad lo hace adecuado para una amplia gama de operaciones de EOD que requieren precisión y adaptabilidad.
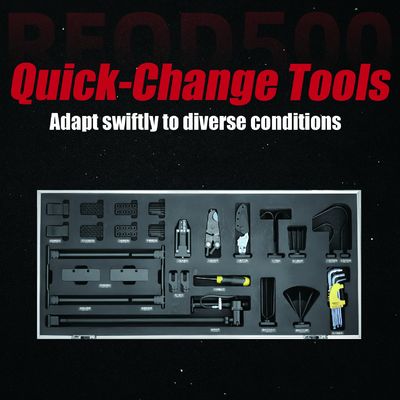
Sistema de herramientas versátil de cambio rápido adaptable a diversas condiciones de trabajo
El JP REOD500 está equipado con un versátil sistema de herramientas de cambio rápido, que incluye múltiples juegos de herramientas de agarre, juegos de herramientas básicas y juegos de herramientas extendidos.Estas herramientas se pueden sustituir rápidamente en función de los requisitos operativos específicos, lo que permite al robot adaptarse sin problemas a diversas condiciones de trabajo y hacer frente eficazmente a diferentes tipos de peligros.
Aplicaciones
Galería de imágenes
Parámetros técnicos
| Plataforma de robots | |
|
Tamaño |
≤ 950×650×650 mm ((Todo el material almacenado) |
|
Peso |
≤ 50 kg ((Contiene dos conjuntos de baterías) |
|
Velocidad máxima |
Se aplicarán las siguientes medidas: |
|
Sobre la capacidad de obstáculo |
≥ 400 mm |
|
Ancho de la ranura |
≥ 400 mm |
|
Gradabilidad |
≥ 45° |
|
Subir escaleras |
≥ 45° |
|
Profundidad de remojo |
≥ 200 mm |
|
Duración de la batería (temperatura normal) |
≥ 3 horas |
|
Desempeño de agarre del brazo robótico |
|
|
Duración del brazo |
Con una anchura igual o superior a 2000 mm |
|
Peso máximo del botín |
≥ 40 kg |
|
Las garras |
2 |
|
Artigos móviles |
8 |
|
Controlador portátil |
|
|
Tamaño |
≤ 270 mm × 170 mm × 100 mm |
|
Peso |
≤ 1,2 kg ((sin mochila) |
|
Pantalla de visualización |
Display de pantalla de 7' |
|
Display de vídeo |
7 canales, uno de los cuales tiene función de zoom de enfoque automático |
|
Método de funcionamiento |
Funcionamiento en doble modo del botón de balanceo y de la pantalla táctil |
|
Método de control |
Control por cable ≥ 100 m ((cable estándar), control inalámbrico ≥ 1000 m ((exterior) |
|
Nivel de protección y adaptabilidad al medio ambiente |
|
|
Plataforma de robots |
Protección IP66 |
|
El brazo |
Protección IP66 |
|
Temperatura de funcionamiento |
-40°C +50°C |
|
Temperatura de almacenamiento |
-45°C+60°C |
Contacta con nosotros
La Srta. Amy
El correo electrónico:Amy-huang@mysmech.com, por su parte.
Productos recomendados