





















Todos los productos
-
Visión nocturna de infrarrojos multifuncional de mano
-
Robot para la eliminación de explosivos
-
Robot de reconocimiento en miniatura
-
Visión nocturna digital monocular
-
Dispositivo digital de visión nocturna
-
Anti francotirador
-
Radar portátil
-
Lámpara de registro de patrulla
-
Equipo de operaciones especiales tácticas
-
Alcance del rifle
-
Telémetro del laser
-
Modelo militar
-
equipo táctico
-
Señuelos inflables
Robot de EOD para el acercamiento seguro y la eliminación de peligros explosivos










| Lugar de origen | China. |
|---|---|
| Nombre de la marca | Particle |
| Número de modelo | Se trata de un sistema de control de calidad. |
| Cantidad de orden mínima | 1 |
| Precio | $356,653 |
| Condiciones de pago | T/T |

Éntreme en contacto con gratis las muestras y los vales.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
skype: sales10@aixton.com
Si usted tiene alguna preocupación, proporcionamos ayuda en línea de 24 horas.
xDatos del producto
| Color | Negro | Soporte personalizado | OED,ODM,OBM |
|---|---|---|---|
| Sobre la capacidad de obstáculo | ≥400MM | Graduabilidad | ≥ 45o |
| Profundidad de vadeo | ≥500mm | Distancia máxima de agarre | 2.6m |
| Diámetro máximo de agarre | ≥ 355 mm | Artigos móviles | 7 |
| Método de control | Control por cable ≥ 200 m ((cable estándar), control inalámbrico ≥ 1000 m ((exterior) | Temperatura de almacenamiento | -45°C+60°C |
| Método de operación | Operación en doble modo de botón y pantalla táctil | Pantalla de visualización del controlador | LCD de 12' o más |
| Tamaño del regulador | ≤ 400 × 300 × 100 mm | Profundidad máxima de agarre | 2.2m |
| Peso máximo de agarre | ≥ 200 kg | Temperatura de funcionamiento | -40℃~+50℃ |
| Grado IP | IP66 | Peso | ≤ 350 kg ((Contiene baterías) |
| Duración de la batería (temperatura normal) | ≥ 10 horas | Capacidad máxima de paso de pendiente | 35 ° |
| Ancho de la ranura | ≥800mm | Velocidad máxima | ≥ 5 m/s |
| Tamaño del robot | 1600×850×1300 mm ((Todo lleno) | ||
| Resaltar | Dispositivo de visión nocturna de infrarrojos multifuncional,Dispositivo portátil de visión nocturna infrarroja,Dispositivo de visión nocturna IP67 |
||
Descripción de producto
Robot EOD para la aproximación y eliminación segura de riesgos explosivos
Descripción y Características
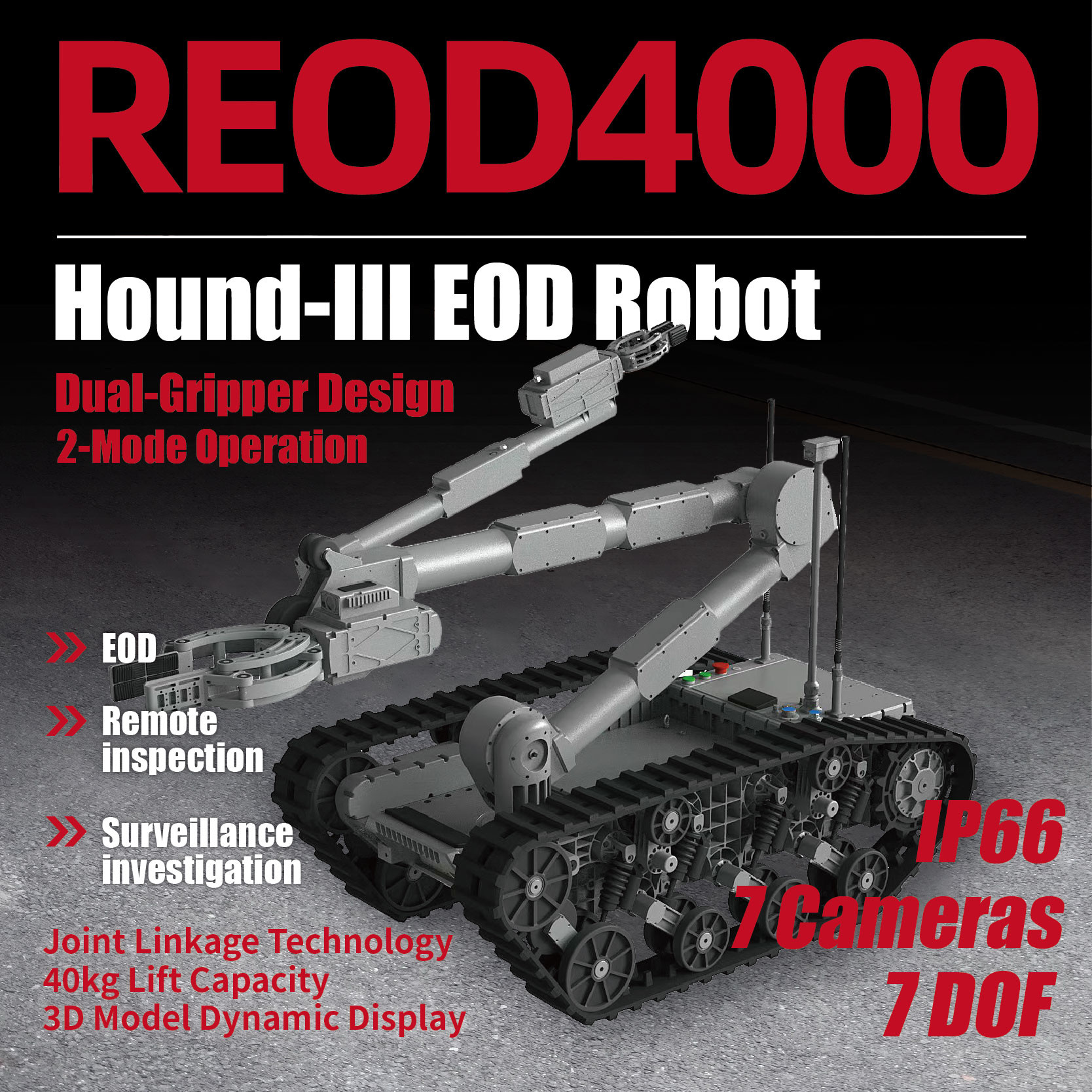
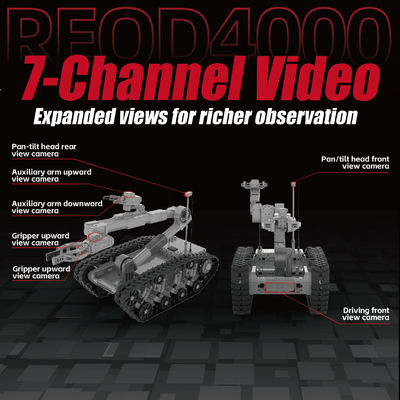
El robot EOD JP REOD4000 es una solución avanzada de tamaño mediano para la eliminación de artefactos explosivos (EOD) en entornos de alto riesgo. Con un potente brazo robótico de 7 grados de libertad, permite a los operadores gestionar objetos peligrosos con precisión, garantizando la máxima seguridad en condiciones restringidas o complejas. El sistema de suspensión "Christie" proporciona una maniobrabilidad perfecta sobre terrenos irregulares y complejos, lo que hace que el REOD4000 sea adecuado para entornos todoterreno y desafiantes. Con un peso máximo de agarre de 200 kg, supera significativamente a sus homólogos, ofreciendo un soporte fiable para la eliminación de explosivos, la seguridad pública y los escenarios de respuesta a emergencias.
El REOD4000 tiene unas dimensiones de 1600 mm × 850 mm × 1300 mm (totalmente plegado) y un peso de ≤350 kg, lo que garantiza tanto la capacidad como la movilidad. Cuenta con una velocidad máxima de ≥5 m/s, una capacidad de superar obstáculos de ≥400 mm y una capacidad de ascenso de ≥45°, lo que proporciona una maniobrabilidad y adaptabilidad superiores en diversos terrenos. Equipado con un sistema de funcionamiento controlado a distancia, el REOD4000 puede acercarse a zonas peligrosas, investigar posibles peligros y ejecutar tareas de eliminación de forma eficiente, minimizando los riesgos para el personal.
![]()
Diseño de brazo mecánico de alta resistencia — Rendimiento de agarre mejorado
Con el "Diseño de brazo mecánico de alta resistencia", el robot está equipado con un potente rendimiento de agarre, lo que le permite agarrar y manipular objetos con facilidad, mejorando significativamente la eficiencia y la eficacia operativa en entornos desafiantes.
![]()
Sistema de orugas de suspensión "Christie" — Navegación sin esfuerzo en terrenos complejos
Con el sistema de orugas de suspensión "Christie", el robot puede atravesar terrenos complejos con la misma facilidad que caminar sobre terreno llano. Este avanzado sistema garantiza un movimiento suave y estable, mejorando en gran medida la movilidad y el rendimiento en entornos accidentados e irregulares.
![]()
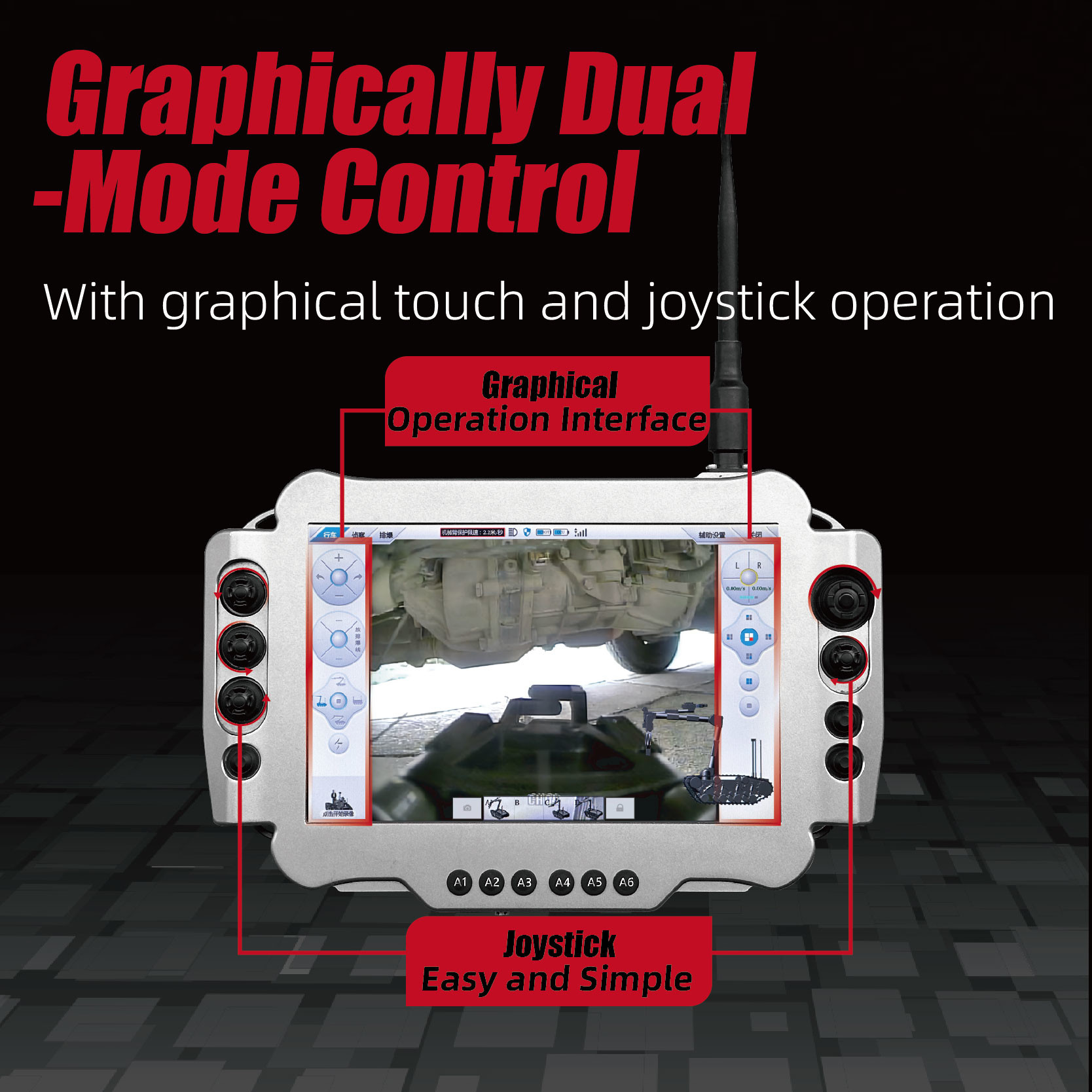
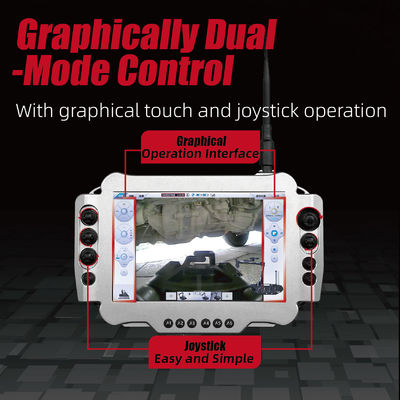
Funcionamiento gráfico de modo dual — Experiencia de funcionamiento cómoda y fiable
Con el sistema de "Funcionamiento gráfico de modo dual", los usuarios pueden cambiar sin problemas entre modos, ofreciendo una experiencia de funcionamiento cómoda y fiable. La interfaz intuitiva garantiza la facilidad de uso, incluso en escenarios exigentes.
![]()
Pantalla remota 3D en tiempo real — Precisión al alcance de su mano
La "Pantalla remota 3D en tiempo real" pone la operación fina directamente frente a sus ojos, lo que le permite controlar y supervisar las tareas con una precisión inigualable, sin importar la distancia.
![]()
Diseño de control "Preestablecido" inteligente — Ajustes de postura personalizados
El "Diseño de control 'Preestablecido' inteligente" permite ajustes de postura de trabajo personalizados, lo que permite a los operadores preestablecer sus posiciones preferidas y optimizar la ejecución de tareas para una mayor eficiencia y comodidad.
![]()
Articulación de brazo robótico 3D X-Y-Z — Control preciso con cálculo automático
El diseño de "Articulación de brazo robótico tridimensional X-Y-Z", basado en el cálculo automático, proporciona un control preciso, ayudando a los usuarios a gestionar sin esfuerzo movimientos complejos con mayor precisión.
![]()
Aplicaciones
Galería de imágenes
|
|
Parámetros técnicos
| Plataforma del robot | |
| Tamaño | 1600×850×1300 mm (Totalmente plegado) |
| Peso | ≤350 kg (Incluye baterías) |
| Velocidad máxima | ≥5 m/s |
| Capacidad para superar obstáculos | ≥400 mm |
| Anchura de la ranura transversal | ≥800 mm |
| Capacidad de ascenso | ≥45° |
| La capacidad máxima de paso de pendiente | 35° |
| Profundidad de vadeo | ≥500 mm |
| Duración de la batería (Temperatura normal) | ≥10 h |
| Rendimiento de agarre del brazo robótico | |
| Distancia máxima de agarre | 2,6 m |
| Peso máximo de agarre | ≥200 kg |
| Diámetro máximo de agarre | ≥355 mm |
| Profundidad máxima de agarre | 2,2 m |
| Articulaciones móviles | 7 |
| Controlador portátil | |
| Tamaño | ≤400×300×100 mm (excluyendo la antena) |
| Peso | ≤3 kg (Sin mochila) |
| Pantalla | ≥12'' LCD |
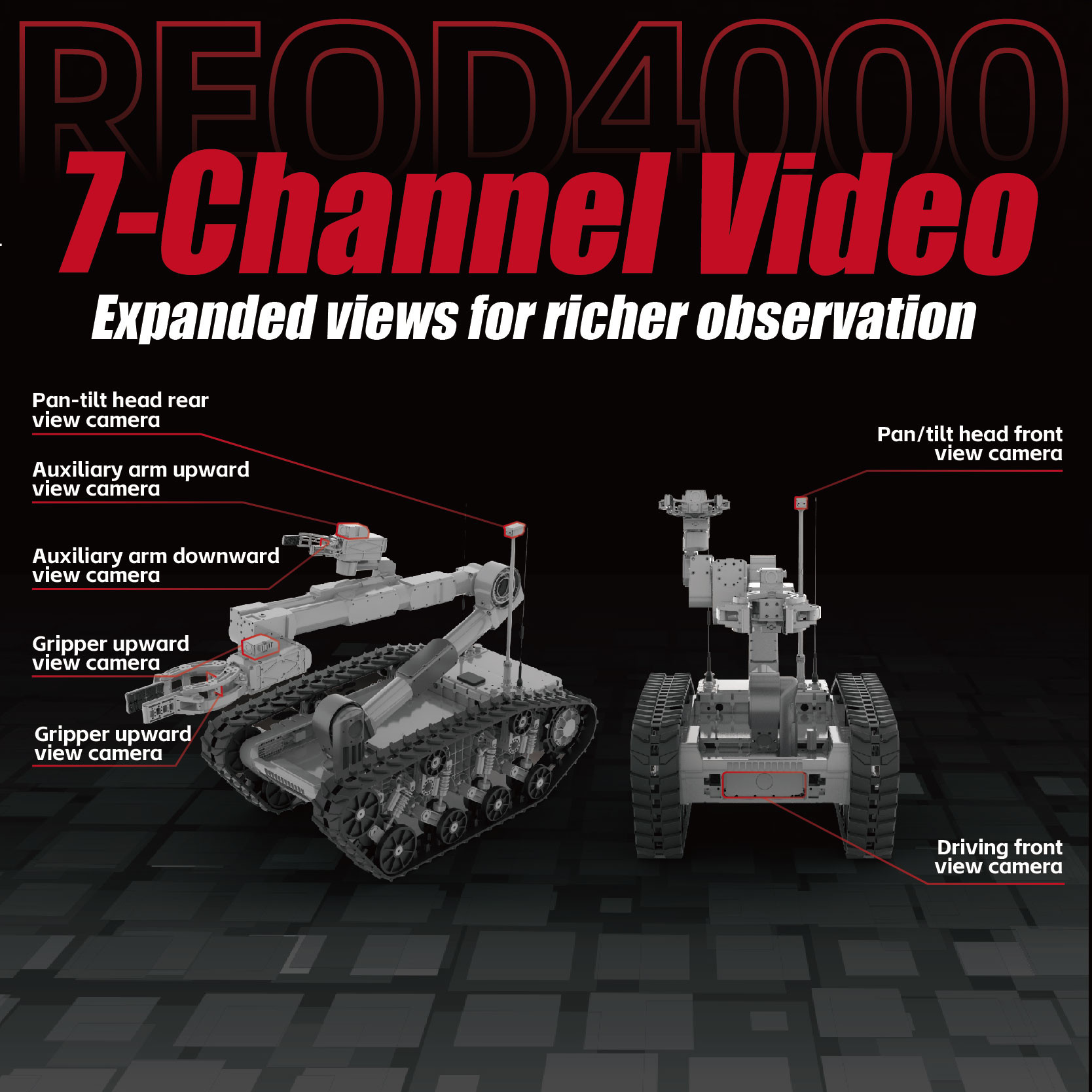
| Visualización de vídeo | ≥7 canales |
| Método de funcionamiento | Funcionamiento en modo dual de balancín de botón y pantalla táctil |
| Método de control | Control por cable ≥200 m (cable estándar), Control inalámbrico ≥1000 m (exterior) |
| Nivel de protección y adaptabilidad ambiental | |
| Plataforma del robot | IP66 |
| Brazo | IP66 |
| Temperatura de funcionamiento | -40℃~+50℃ |
Sra. Amy
whatsapp/wechat: +86 13621280280
Productos recomendados